Basic mathematics
Table of contents
1 Hello World (and Universe)!
PRINT "Hello $1!"$ feenox hello.fee World
Hello World!
$ feenox hello.fee Universe
Hello Universe!
$
2 Ten ways of computing \pi
Internal symbol
piequal to libc’sM_PI\pi = \pi
Four times the arc tangent of one
\pi = 4 \cdot \arctan{1}
The root of \tan x=0
x / \tan x = 0
The integral of the gaussian bell, squared
\pi = \left[ \int_{-\infty}^{\infty} e^{-x^2} \, dx \right]^2
The integral of (x^2 + y^2) < 1 inside a unit square
\pi = \int_{-1}^{+1} \int_{-1}^{+1} \left[(x^2 + y^2) < 1\right] \, dy \, dx
The integral of one inside a parametrized circle
\pi = \int_{-1}^{+1} \int_{-\sqrt{1-x^2}}^{+\sqrt{1-x^2}} \, dy \, dx
The Gregoy-Leibniz sum
\pi = 4 \cdot \sum_{i}^{\infty} \frac{(-1)^{i+1}}{2i-1}
The Abraham-Sharp sum
\pi = \sum_{i}^{\infty} \frac{2 \cdot (-1)^i \cdot 3^{\frac{1}{2-i}}}{2i+1}
An integral which is equal to 22/7-\pi
22/7 - \pi = \int_{0}^{1} \frac{x^4 \cdot (1-x)^4}{1+x^2} \, dx
Ramanujan-Sato series
\frac{1}{\pi} = \frac{2 \cdot \sqrt{2}}{99^2} \cdot \sum_{i=0}^{\infty} \frac{(4i)!}{(i^4)!} \cdot \frac{26390 \cdot i + 1103}{396^{4i}}
# computing pi in ten different ways
VECTOR piapprox SIZE 10
VAR x y
# the double-precision internal representation of pi (M_PI)
piapprox[1] = pi
# four times the arc-tangent of the unity
piapprox[2] = 4*atan(1)
# the abscissae x where tan(x) = 0 in the range [3:3.5]
piapprox[3] = root(tan(x), x, 3, 3.5)
# the square of the numerical integral of the gaussian curve
piapprox[4] = integral(exp(-x^2), x, -10, 10)^2
# the numerical integral of a circle inscribed in a unit square
piapprox[5] = integral(integral((x^2+y^2) < 1, y, -1, 1), x, -1, 1)
# the numerical integral of a circle parametrized with sqrt(1-x^2)
piapprox[6] = integral(integral(1, y, -sqrt(1-x^2), sqrt(1-x^2)), x, -1, 1)
# the gregory-leibniz sum (one hundred thousand terms)
piapprox[7] = 4*sum((-1)^(i+1)/(2*i-1), i, 1, 1e5)
# the abraham sharp sum (twenty-one terms)
piapprox[8] = sum(2*(-1)^i * 3^(1/2-i)/(2*i+1), i, 0, 20)
# this integral is equal to 22/7-pi
piapprox[9] = 22/7-integral((x^4*(1-x)^4)/(1+x^2), x, 0, 1)
# ramanujan-sato series
piapprox[10] = 1/(2*sqrt(2)/(99^2)*sum(gammaf(4*i)/gammaf(i)^4 * (26390*i + 1103)/(396^(4*i)), i, 0, 2))
PRINT_VECTOR "% .16f" piapprox piapprox(i)-pi$ feenox pi.fee
3.1415926535897931 0.0000000000000000
3.1415926535897931 0.0000000000000000
3.1415926535897936 0.0000000000000004
3.1415926535899108 0.0000000000001177
3.1417605332857996 0.0001678796960065
3.1415956548678512 0.0000030012780581
3.1415826535897198 -0.0000100000000733
3.1415926535956351 0.0000000000058420
3.1415926535897931 0.0000000000000000
3.1415927109074255 0.0000000573176324
$
3 Financial decisions under inflation
You live in a country with a high inflation rate. A retailer offers you a good with two payment options:
- 30% off the full price plus 3 equal monthly installments, or
- full price in 12 equal monthly installments
If the inflation rate is small (large), option a (b) wins.
Question What is the monthly inflation rate at which the two options are equally good (or bad)?
# n = number of payments
# d = discount
# r = monthly inflation rate
present_value(n, d, r) = sum((1-d)/n * (1/(1+r))^(i-1), i, 1, n)
r0 = root(present_value(12,0,r) - present_value(3,0.3,r), r, 0, 0.2)
PRINTF "the tipping monthly inflation is %g (that means %.1f%% per month and %.1f%% per year)" r0 100*r0 100*(1+r0)^12
PRINT
PRINTF "with 12 payments no discount with r = %g you pay %.3f" r0+0.01 present_value(12,0,r0+0.01)
PRINTF "with 3 payments and 30%% off with r = %g you pay %.3f" r0+0.01 present_value(3,0.3,r0+0.01)
PRINT
PRINTF "with 12 payments no discount with r = %g you pay %.3f" r0-0.01 present_value(12,0,r0-0.01)
PRINTF "with 3 payments and 30%% off with r = %g you pay %.3f" r0-0.01 present_value(3,0.3,r0-0.01)$ feenox inflation.fee
the tipping monthly inflation is 0.0931703 (that means 9.3% per month and 291.2% per year)
with 12 payments no discount with r = 0.10317 you pay 0.617
with 3 payments and 30% off with r = 0.10317 you pay 0.637
with 12 payments no discount with r = 0.0831703 you pay 0.669
with 3 payments and 30% off with r = 0.0831703 you pay 0.648
$
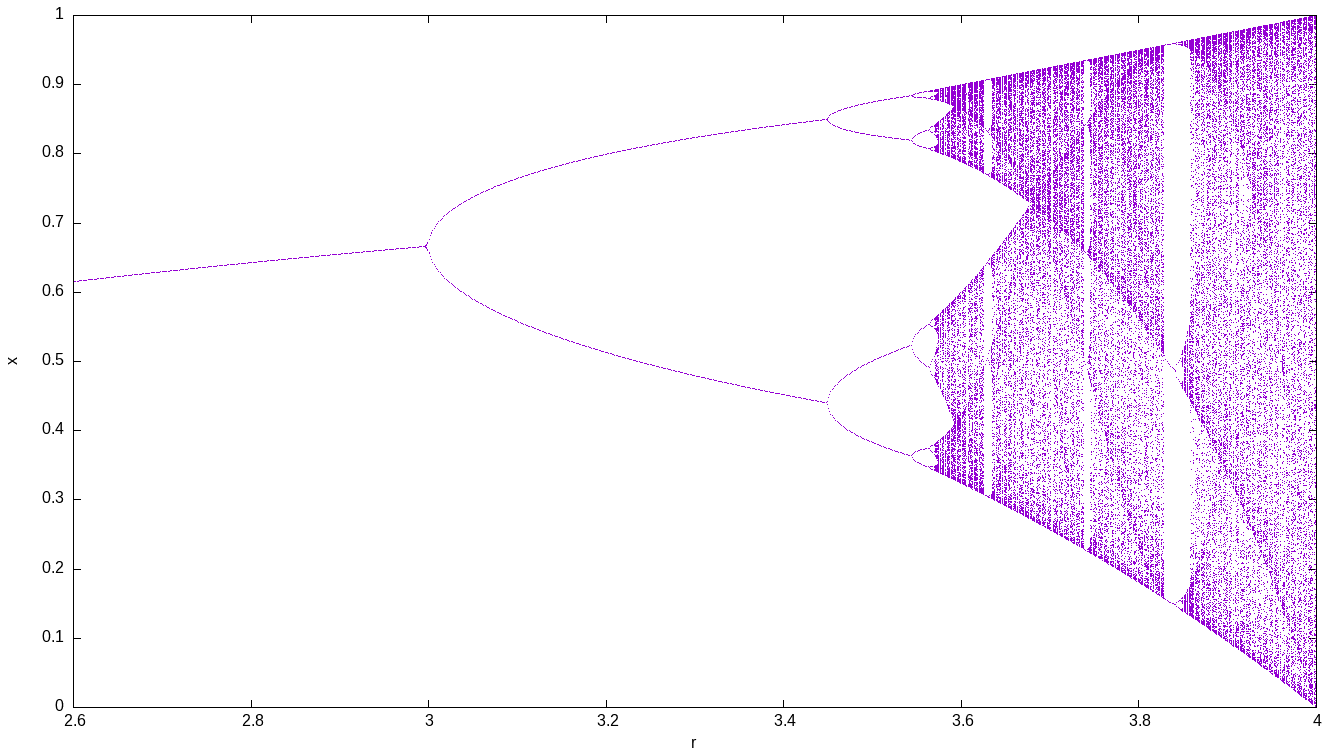
4 The logistic map
Plot the asymptotic behavior of the logistic map
x_{n+1} = r \cdot x \cdot (1-x)
for a range of the parameter r.
DEFAULT_ARGUMENT_VALUE 1 2.6 # by default show r in [2.6:4]
DEFAULT_ARGUMENT_VALUE 2 4
steps_per_r = 2^10
steps_asymptotic = 2^8
steps_for_r = 2^10
static_steps = steps_for_r*steps_per_r
# change r every steps_per_r steps
IF mod(step_static,steps_per_r)=1
r = quasi_random($1,$2)
ENDIF
x_init = 0.5 # start at x = 0.5
x = r*x*(1-x) # apply the map
IF step_static-steps_per_r*floor(step_static/steps_per_r)>(steps_per_r-steps_asymptotic)
# write the asymptotic behavior only
PRINT r x
ENDIF$ gnuplot
gnuplot> plot "< feenox logistic.fee" w p pt 50 ps 0.02
gnuplot> quit
$
5 The Fibonacci sequence
5.1 Using the closed-form formula as a function
When directly executing FeenoX, one gives a single argument to the executable with the path to the main input file. For example, the following input computes the first twenty numbers of the Fibonacci sequence using the closed-form formula
f(n) = \frac{\varphi^n - (1-\varphi)^n}{\sqrt{5}}
where \varphi=(1+\sqrt{5})/2 is the Golden ratio.
# the fibonacci sequence as function
phi = (1+sqrt(5))/2
f(n) = (phi^n - (1-phi)^n)/sqrt(5)
PRINT_FUNCTION f MIN 1 MAX 20 STEP 1$ feenox fibo_formula.fee | tee one
1 1
2 1
3 2
4 3
5 5
6 8
7 13
8 21
9 34
10 55
11 89
12 144
13 233
14 377
15 610
16 987
17 1597
18 2584
19 4181
20 6765
$
5.2 Using a vector
We could also have computed these twenty numbers by using the direct definition of the sequence into a vector \vec{f} of size 20.
# the fibonacci sequence as a vector
VECTOR f SIZE 20
f[i]<1:2> = 1
f[i]<3:vecsize(f)> = f[i-2] + f[i-1]
PRINT_VECTOR i f$ feenox fibo_vector.fee > two
$
5.3 Solving an iterative problem
Finally, we print the sequence as an iterative problem and check that the three outputs are the same.
static_steps = 20
#static_iterations = 1476 # limit of doubles
IF step_static=1|step_static=2
f_n = 1
f_nminus1 = 1
f_nminus2 = 1
ELSE
f_n = f_nminus1 + f_nminus2
f_nminus2 = f_nminus1
f_nminus1 = f_n
ENDIF
PRINT step_static f_n$ feenox fibo_iterative.fee > three
$ diff one two
$ diff two three
$
6 Computing the derivative of a function as a Unix filter
This example illustrates how well FeenoX integrates into the Unix
philosophy. Let’s say one has a function f(t) as an ASCII file with two columns and
one wants to compute the derivative f'(t). Just pipe the function file into
this example’s input file derivative.fee used as a
filter.
For example, this small input file f.fee writes the
function of time provided in the first command-line argument from zero
up to the second command-line argument:
end_time = $2
PRINT t $1$ feenox f.fee "sin(t)" 1
0 0
0.0625 0.0624593
0.125 0.124675
0.1875 0.186403
0.25 0.247404
0.3125 0.307439
0.375 0.366273
0.4375 0.423676
0.5 0.479426
0.5625 0.533303
0.625 0.585097
0.6875 0.634607
0.75 0.681639
0.8125 0.726009
0.875 0.767544
0.9375 0.806081
1 0.841471
$Then we can pipe the output of this command to the derivative filter. Note that
- The
derivative.feehas the execution flag has on and a shebang line pointing to a global location of the FeenoX binary in/usr/local/bine.g. after doingsudo make install. - The first argument of
derivative.feecontrols the time step. This is only important to control the number of output lines. It does not have anything to do with precision, since the derivative is computed using an adaptive centered numerical differentiation scheme using the GNU Scientific Library. - Before doing the actual differentiation, the input data is interpolated using a third-order monotonous scheme (also with GSL).
- TL;DR: this is not just “current value minus last value divided time increment.”
#!/usr/bin/feenox
# read the function from stdin
FUNCTION f(t) FILE - INTERPOLATION steffen
# detect the domain range
a = vecmin(vec_f_t)
b = vecmax(vec_f_t)
# time step from arguments (or default 10 steps)
DEFAULT_ARGUMENT_VALUE 1 (b-a)/10
h = $1
# compute the derivative with a wrapper for gsl_deriv_central()
VAR t'
f'(t) = derivative(f(t'),t',t)
# write the result
PRINT_FUNCTION f' MIN a+0.5*h MAX b-0.5*h STEP h$ chmod +x derivative.sh
$ feenox f.fee "sin(t)" 1 | ./derivative.fee 0.1 | tee f_prime.dat
0.05 0.998725
0.15 0.989041
0.25 0.968288
0.35 0.939643
0.45 0.900427
0.55 0.852504
0.65 0.796311
0.75 0.731216
0.85 0.66018
0.95 0.574296
$

7 On the evaluation of thermal expansion coefficients
When solving thermal-mechanical problems it is customary to use thermal expansion coefficients in order to take into account the mechanical strains induced by changes in the material temperature with respect to a reference temperature where the deformation is identically zero. These coefficients \alpha are defined as the partial derivative of the strain \epsilon with respect to temperature T such that differential relationships like
d\epsilon = \frac{\partial \epsilon}{\partial T} \, dT = \alpha \cdot dT
hold. This derivative \alpha is called the instantaneous thermal expansion coefficient. For finite temperature increments, one would like to be able to write
\Delta \epsilon = \alpha \cdot \Delta T
But if the strain is not linear with respect to the temperature—which is the most common case—then \alpha depends on T. Therefore, when dealing with finite temperature increments \Delta T = T-T_0 where the thermal expansion coefficient \alpha(T) depends on the temperature itself then mean values for the thermal expansion ought to be used:
\Delta \epsilon = \int_{\epsilon_0}^{\epsilon} d\epsilon^{\prime} = \int_{T_0}^{T} \frac{\partial \epsilon}{\partial T^\prime} \, dT^\prime = \int_{T_0}^{T} \alpha(T^\prime) \, dT^\prime
We can multiply and divide by \Delta T to obtain
\int_{T_0}^{T} \alpha(T^\prime) \, dT^\prime \cdot \frac{\Delta T}{\Delta T} = \bar{\alpha}(T) \cdot \Delta T
where the mean expansion coefficient for the temperature range [T_0,T] is
\bar{\alpha}(T) = \frac{\displaystyle \int_{T_0}^{T} \alpha(T^\prime) \, dT^\prime}{T-T_0}
This is of course the classical calculus result of the mean value of a continuous one-dimensional function in a certain range.
Let \epsilon(T) be the linear thermal expansion of a given material in a certain direction when heating a piece of such material from an initial temperature T_0 up to T so that \epsilon(T_0)=0.
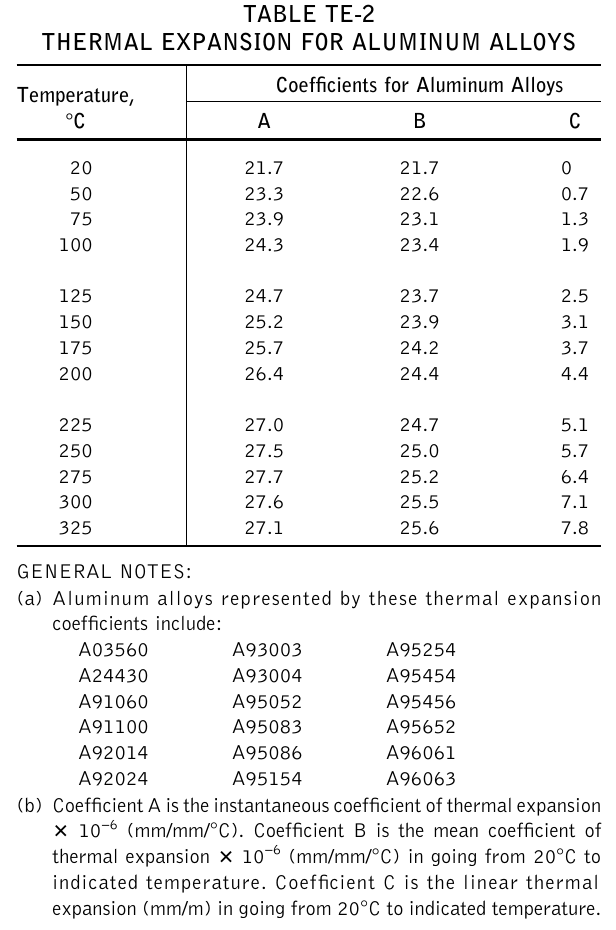
From our previous analysis, we can see that in fig. 1:
\begin{aligned} A(T) &= \alpha(T) = \frac{\partial \epsilon}{\partial T} \\ B(T) &= \bar{\alpha}(T) = \frac{\epsilon(T)}{T-T_0} = \frac{\displaystyle \int_{T_0}^{T} \alpha(T^\prime) \, dT^\prime}{T - T_0} \\ C(T) &= \epsilon(T) = \int_{T_0}^T \alpha(T^\prime) \, dT^\prime \end{aligned}
Therefore,
- A(T) can be computed out of C(T)
- B(T) can be computed either out of A(T) or C(T)
- C(T) can be computed out of A(T)
# just in case we wanted to interpolate with another method (linear, splines, etc.)
DEFAULT_ARGUMENT_VALUE 1 steffen
# read columns from data file and interpolate
# A is the instantaenous coefficient of thermal expansion x 10^-6 (mm/mm/ºC)
FUNCTION A(T) FILE asme-expansion-table.dat COLUMNS 1 2 INTERPOLATION $1
# B is the mean coefficient of thermal expansion x 10^-6 (mm/mm/ºC) in going
# from 20ºC to indicated temperature
FUNCTION B(T) FILE asme-expansion-table.dat COLUMNS 1 3 INTERPOLATION $1
# C is the linear thermal expansion (mm/m) in going from 20ºC
# to indicated temperature
FUNCTION C(T) FILE asme-expansion-table.dat COLUMNS 1 4 INTERPOLATION $1
VAR T' # dummy variable for integration
T0 = 20 # reference temperature
T_min = vecmin(vec_A_T) # smallest argument of function A(T)
T_max = vecmax(vec_A_T) # largest argument of function A(T)
# compute one column from another one
A_fromC(T) := 1e3*derivative(C(T'), T', T)
B_fromA(T) := integral(A(T'), T', T0, T)/(T-T0)
B_fromC(T) := 1e3*C(T)/(T-T0) # C is in mm/m, hence the 1e3
C_fromA(T) := 1e-3*integral(A(T'), T', T0, T)
# write interpolated results
PRINT_FUNCTION A A_fromC B B_fromA B_fromC C C_fromA MIN T_min+1 MAX T_max-1 STEP 1$ cat asme-expansion-table.dat
# temp A B C
20 21.7 21.7 0
50 23.3 22.6 0.7
75 23.9 23.1 1.3
100 24.3 23.4 1.9
125 24.7 23.7 2.5
150 25.2 23.9 3.1
175 25.7 24.2 3.7
200 26.4 24.4 4.4
225 27.0 24.7 5.1
250 27.5 25.0 5.7
275 27.7 25.2 6.4
300 27.6 25.5 7.1
325 27.1 25.6 7.8
$ feenox asme-expansion.fee > asme-expansion-interpolation.dat
$ pyxplot asme-expansion.ppl
$



The conclusion (see this, this and this reports) is that values rounded to only one decimal value as presented in the ASME code section II subsection D tables are not enough to satisfy the mathematical relationships between the physical magnitudes related to thermal expansion properties of the materials listed. Therefore, care has to be taken as which of the three columns is chosen when using the data for actual thermo-mechanical numerical computations. As an exercise, the reader is encouraged to try different interpolation algorithms to see how the results change. Spoiler alert: they are also highly sensible to the interpolation method used to “fill in” the gaps between the table values.
8 Buffon’s needle
Buffon’s needle is a classical probability problem that dates back from the 18th century whose solution depends on the value of \pi. When I first read about this problem in my high-school years, I could not believe two things. The first one, that the number \pi had something to do with the probability a stick has of crossing a line. And the other, that one would actually be able to compute \pi by throwing away sticks. Of course, this was long before I learned about calculus, distributions and Monte Carlo methods.
The problem consists of a table of length L over which transversal lines separated by a length d are drawn. A stick (needle) of length \ell is randomly thrown over the table. What is the probability p that the stick crosses one line?

For \ell < d the answer is
p = \frac{ 2 \ell }{ \pi d}
To convince myself that the two facts I did not believe back when I was a youngster were actually true, I would just run the example below. Four experiments (I know that generating random numbers in a digital computer is not a real experiment, as neither is solving the equations of a chaotic natural convection loop. However, I could not come up with a better word) of ten millions throws each are simulated, and the experimental frequency is compared to the theoretical value. I am now convinced.
To solve the Buffon’s needle problem the Monte Carlo way, two random numbers are generated: the distance 0 \leq x < L from one side of the table to the center of the thrown stick, and the angle 0 \leq \theta < 2\pi with respect to the table longitudinal axis. One way of checking whether a stick crosses or not a line is the following. First, compute the location of both ends of the stick
\begin{align*} x_1 &= x + \frac{1}{2} \ell \cos(\theta) \\ x_2 &= x - \frac{1}{2} \ell \cos(\theta) \\ \end{align*}
Now, if the floor of x_1/d is equal to the floor of x_2/d, the stick does not cross a line. Otherwise, it does.
The input file iteratively performs 10^7 throws and prints the partial frequency of crosses as a function of the number of throws, along with the constant analytical result. Four runs are performed, and the results are plotted in the figure.
static_steps = 1e7 # number of times we trow the stick
L = 10 # length of the table
l = 0.8 # length of the stick
d = 1 # distance between lines
result = 2*l/(pi*d) # expected theoretical result
x = random(0, L) # location of the center of the stick
theta = random(0, 2*pi) # the resulting angle
x1 = x + 0.5*l*cos(theta) # coordinates of the stick ends
x2 = x - 0.5*l*cos(theta)
# increase count if the stick crosses one line
# (remember ! is the "not equal" operator)
count = count + (floor(x1/d)!floor(x2/d))
# print the partial results
PRINT %g step_static count/step_static result SKIP_STATIC_STEP 1e5$ for i in $(seq 1 4); do echo $i; feenox buffon.fee > buffon${i}.dat; done
1
2
3
4
$ pyxplot buffon.ppl
